Marcel – Humanoid Robot
A fully custom-built humanoid robot for research, education, and automation.
Project Overview
With the rise of advanced humanoid robots like Atlas, Optimus, and Apollo, I was inspired to build something of my own. This led to the birth of the Marcel Project—a humanoid robot designed to be as affordable and approachable as possible.
Marcel was created to function in social environments like bars, hotel receptions, or healthcare settings, where a friendly robotic presence can enhance user experience. Despite limited funding and intense time pressure, I designed and programmed everything from scratch, pushing my skills to their limits.
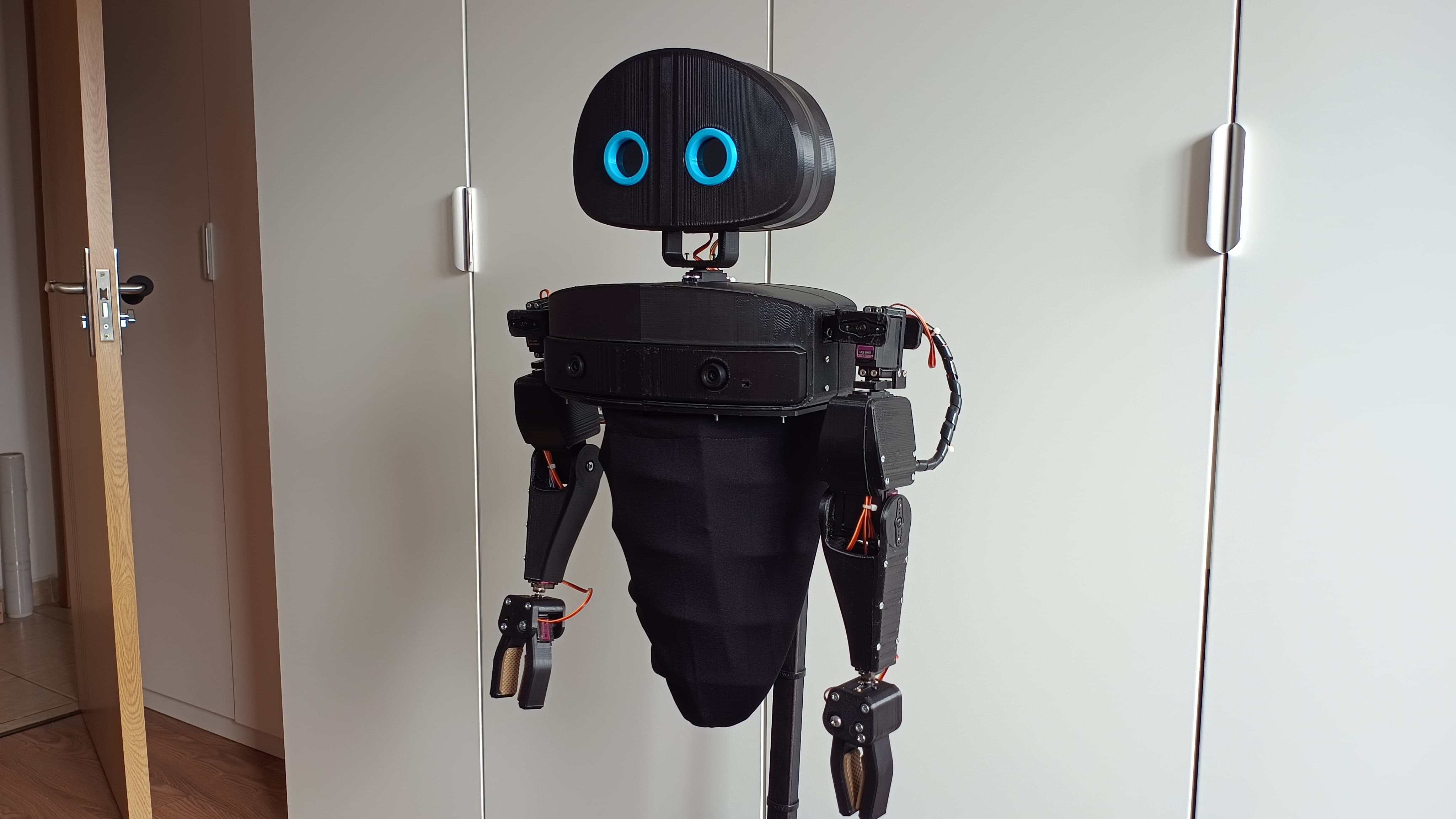
The project started in December 2023 and evolved through continuous sketching, modeling, testing, and iteration. Marcel can see, hear, speak, and express emotions using LCD eyes—offering surprisingly natural human interaction through stereo vision, speech synthesis, and motion.
Technical Details
Marcel’s base is constructed from welded square steel rods for structural durability, while the main body is 3D printed using PLA for low-cost, rapid prototyping. The design balances strength with accessibility.
His movement is powered by two NEMA 23 motors at the base for mobility, and 5-DOF arms actuated by servo motors controlled via Arduino Nanos using inverse kinematics. Ultrasonic sensors help with obstacle avoidance.
For perception and interaction, Marcel features a stereo camera, microphones, speaker, and LCD "eyes". His AI runs on a dual-laptop system when needed, combining a LLaMA model for conversation and a LLaVA model for visual understanding. A React-based control dashboard allows for remote monitoring.
Development Process
The project began with early sketches and a deep dive into humanoid robot designs. I analyzed existing solutions and aimed to replicate core capabilities at a fraction of the cost.
Mechanical and electrical prototyping involved multiple design revisions. From weak, breakable hand prototypes to final reinforced arms, the build went through several key iterations.
Software development included integrating large language and vision models, designing a real-time control interface, and building fallback systems for hardware failures—like the emergency split-compute solution used at RoboChallenge.
Outcomes & Impact
At ONCS 2024, Marcel earned 3rd place nationally, just 1.5 points away from the international stage—despite critical failures like hand breakage right before the final presentation.
At InfoEducație 2024, we received a Special Mention after improving the robot’s hardware and presentation, and used the event to fine-tune Marcel before RoboChallenge.
At RoboChallenge 2024, Marcel won 2nd place internationally. Despite a RAM failure in the main laptop the night before, I managed to split the system between two laptops and get everything running in time.
Marcel became one of my most ambitious and rewarding projects to date—blending robotics, AI, and design while inspiring future work on ARC and other advanced systems.